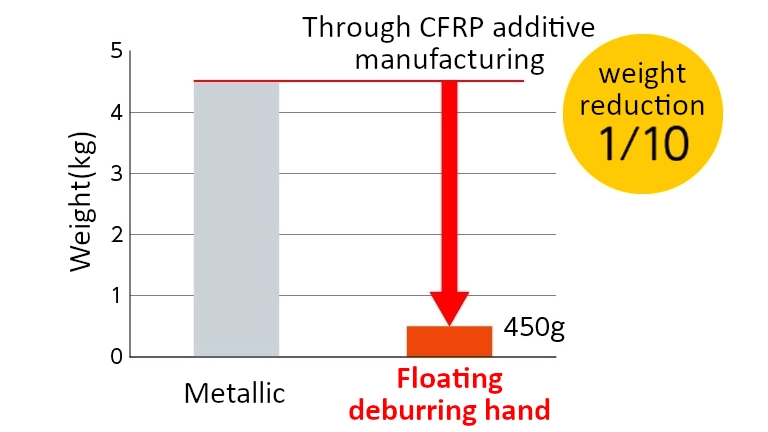
Through CFRP additive manufacturing, Floating deburring hand achieves weight reduction to 1/10th: from 4.5kg to 450g.

Weight reduction is achieved by material replacement from metal to CFRP with a specific gravity: 1.2 g/cm3 and hollow internal structure.
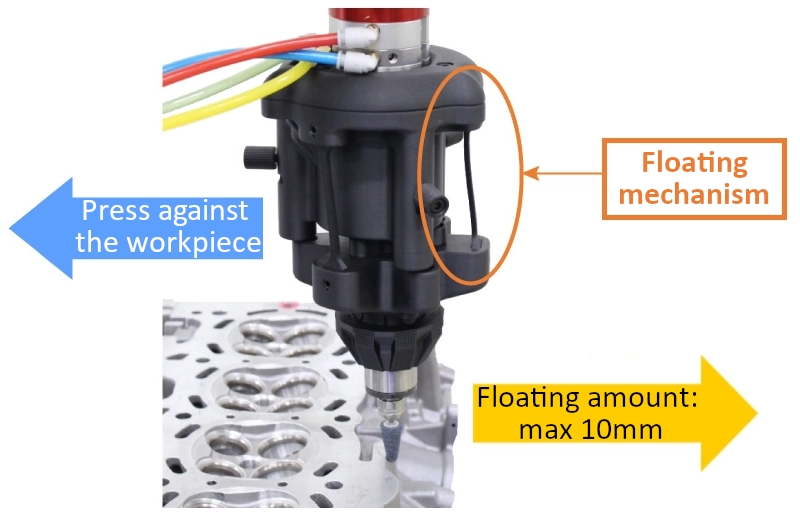
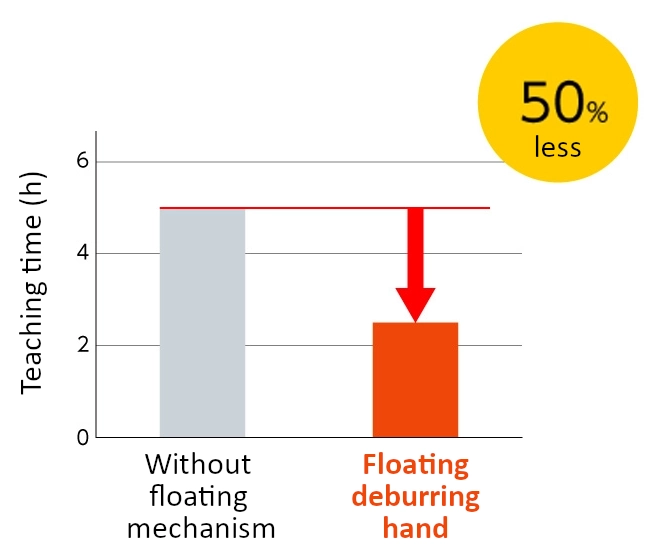
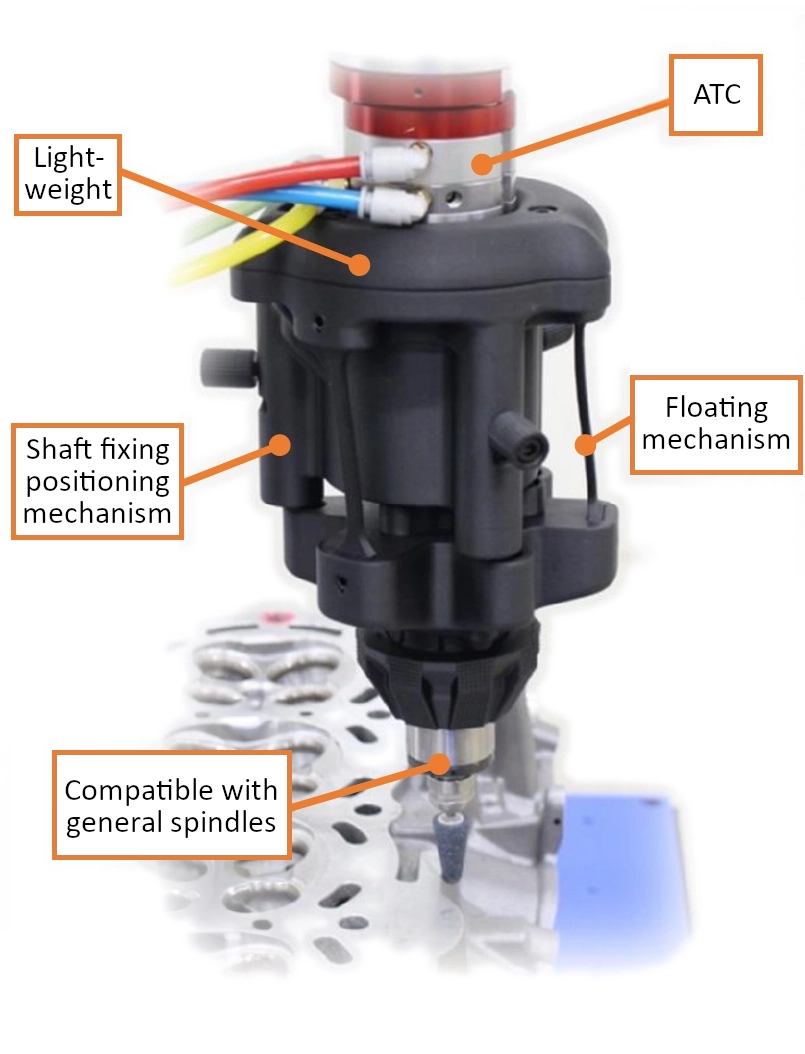
Floating deburring hand's floating mechanism reduces teaching time by 50%.