

Target work example: Center
Power source: Coolant (pressure: 1Mpa)
Gripping force: 18kgf
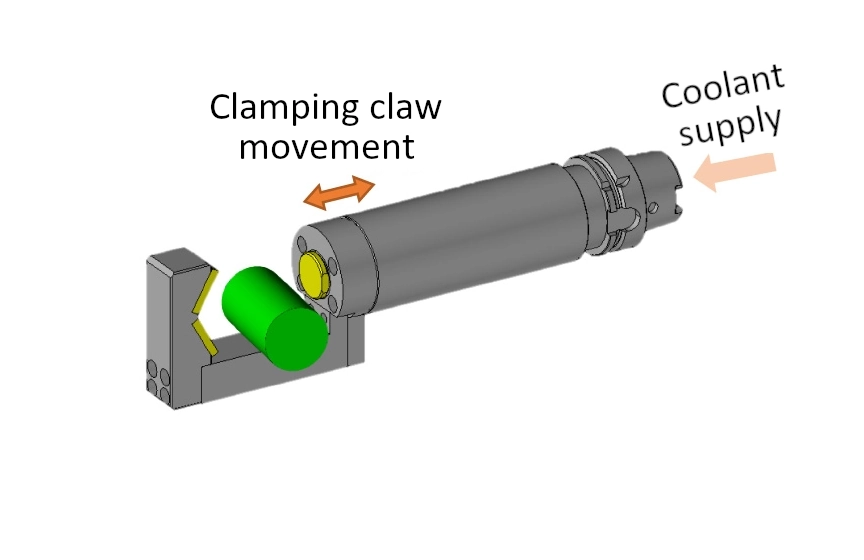
Target work example: Shaft
Power Source: Coolant (pressure: 1.5Mpa)
Gripping Force: 9.3kgf ~ 22.7kgf
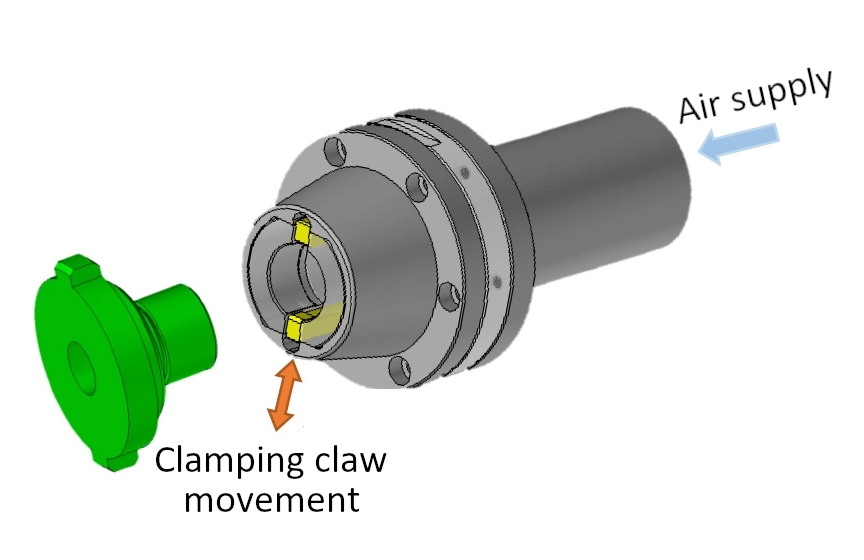
Target work example: Pump body
Power source: Air (pressure: 0.35Mpa)
Gripping force: 2.0 kgf
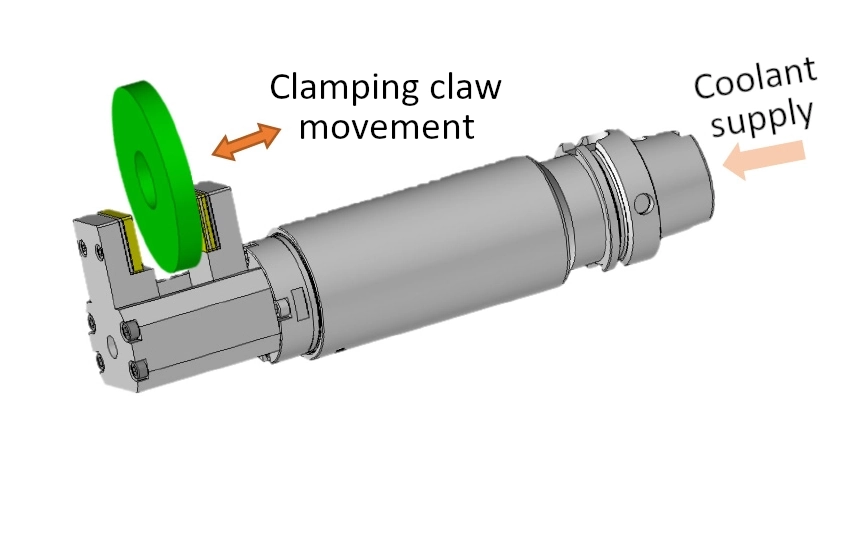
Target work example: Flat gear
Power Source: Coolant (pressure: 1.0Mpa)
Gripping Force: 29kgf ~ 65kgf
Target work example: Master
Power source: Coolant (pressure: 1Mpa)
Gripping force: 30kgf
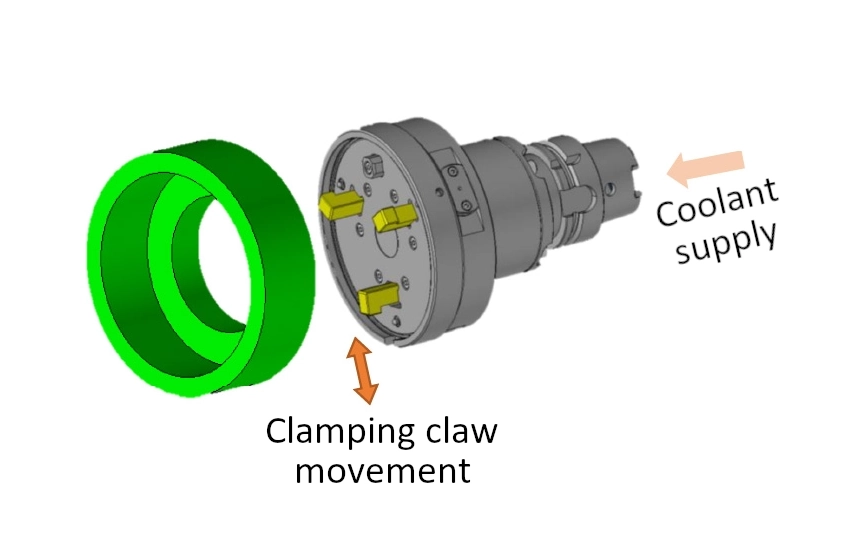
Target work example: Reference plate
Power source: Coolant (pressure: 1Mpa)
Gripping force: Claw hook in L position
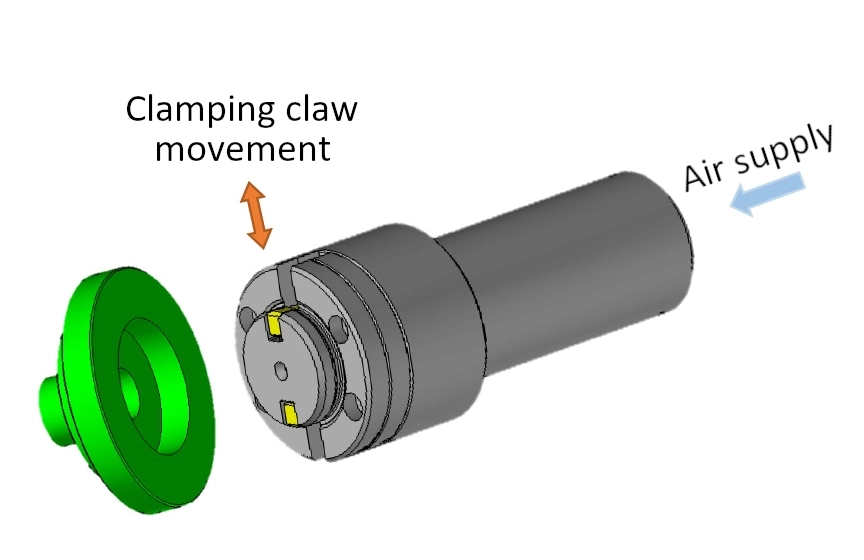
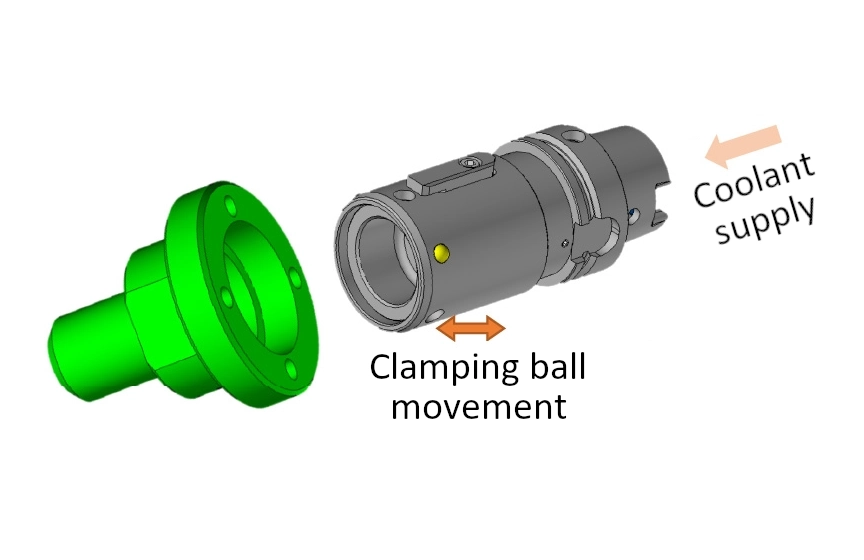
Target work example: Pump body
Power source: Air (pressure: 0.35Mpa)
Gripping force: 2.2kgf
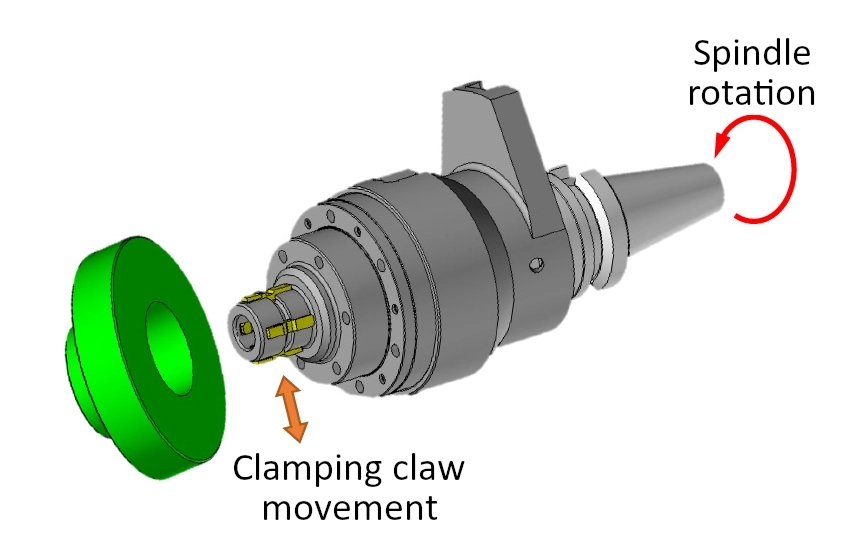
Target work example: Ring gear
Power source: Spindle rotation
Gripping force: 12kgf